Introduction
Since the Ublox ZED-F9P GNSS RTK module came out,
there are many boards on the market that use it. I have had the opportunity to test
the ArduSimple RTK2B-V3 board for a long time with results that I will now
describe.
I have performed numerous tests, static and
dynamic, to verify the operation and also the connection and the development of
firmware of the systems that I have made with 32-bit microcontrollers. I used the
ArduSimple RTK2B-V3 board with G4 module for receiving RCM3 messages from a
reference station with NTRIP and I also connected the Base-Rover stations
directly to see the highest possible accuracy.
The results, as we will see later, were very
good even if the operating sites available don’t have the maximum visibility of
the sky and the distance to the reference station was quite high.
The
Ublox ZED-F9P module
The ZED-F9P module can receive and track
multiple GNSS constellations: GPS,
GLONASS, Galileo and BeiDou plus SBAS and QZSS satellites as shown in the
following table.
|
GPS |
GLONASS |
Galileo |
BeiDou |
|
L1C/A (1575.42 MHz) |
L1OF (1602
MHz + k*562.5 kHz, k =
–7,..., 5, 6) |
E1-B/C
(1575.42 MHz) |
B1I
(1561.098 MHz) |
|
L2C (1227.60 MHz) |
L2OF (1246
MHz + k*437.5 kHz, k =
–7,..., 5, 6) |
E5b
(1207.140 MHz) |
B2I
(1207.140 MHz) |
All satellites in view can be processed to provide
an RTK navigation solution when used with correction data. It has a USB
interface, two UART ports and also I2C and SPI interfaces.
The ZED-F9P position accuracy in RTK mode, is
at the centimeter level, as confirmed by the numerous tests I have done.
The
RTK2B-V3 board
ArduSimple RTK2B is a very compact and
versatile board. In addition to the ZED-F9P module, it also mounts an Xbee-type
connector complete with a USB/TTL adapter and a second USB port for its
programming.
ArduSimple manufacturer supplies a series of
modules to be mounted on this interface for radio communication such as
Bluetooth, G4, WiFi, Lora, etc.
Figure 1 shows the board, whose dimensions are similar to that of Arduino Uno/Zero, to which it is perfectly compatible.
 |
| Figure 1 |
The I/O signals are 1.8V, 3.3V and 5V
compatible, adjusted automatically on IOREF voltage.
This board can be powered directly from the
Arduino headers or via a micro USB connector and is protected against double
power source (header and USB). The power consumption, without Xbee modules, is about
200 mW. The board is equipped with a high power, low noise LDO (Low Drop Out)
regulator. With only 390 mV dropout it is possible to power the board with a
single Li-ion cell.
Numerous on-board LEDs indicate to the user the
operating status of the system.
The board has a connector compatible with
ArduPilot systems for high accuracy position control applications.
RTK
tests with NTRIP
The first tests were carried out with the
correction sent by a reference station of the Ligurian Regional GNSS Network
via NTRIP, using first the PC with U-Blox U-Center software, then a G4 module
on the ArduSimple Xbee slot. The connection via PC to the internet allowed to
better test the NTRIP configuration.
NTRIP (Networked Transport of RTCM via Internet
Protocol) is a protocol developed by the Federal Agency for Cartography and
Geodesy of Germany (BKG) in late 2004 that allows for the streaming of DGPS or
RTK correction data via the Internet. With a personal computer or mobile phone
supporting TCP/IP, NTRIP is the best way to send RTCM messages to the rover RTK
receiver without having to use an expensive local radio, which to comply with
radio communication laws, they are low power and therefore short range.
The 4G
LTE module
The G4 module used is a Telit model LE910 V2.
Whose bands, for Europe, the Middle East and Asia, are:
·
4G
Bands (MHz): B1(2100), B3(1800), B7(2600), B8(900), B20(800)
·
3G
Bands (MHz): B2(2100), B8(900)
·
2G
Bands (MHz): B3(1800),B8(900)
This module is mounted by ArduSimple on an Xbee
compatible board whose appearance is shown in figure 2.
 |
| Figure 2 |
This module requires high power (HP) and must
be mounted on RTK2-V3 type boards.
For its configuration I followed the
instructions of the hookup-guide [6] to which I refer the reader.
The functional scheme is shown in figure 3.
 |
| Figure 3 |
I have chosen NEAR3 as the Mount Point.
To achieve a high resolution, High Precision Mode must be configured.
In this way latitude and longitude therefore have seven digits after the decimal point and the altitude has three
digits after the decimal point.
Connect the Rover to the PC and start the
U-Center program, from the 'Configure' menu set 'NMEA protocol' and click on
'High Precision Mode' and then save the configuration.
I have assembled all the components of the
Rover in a box, as shown in figure 4.
 |
| Figure 4 |
In this case I used an ATmega328P based OpenLog
system to save the corrected NMEA sentences from the RTK receiver to SD. In some
tests I used a much more performing system (uChipTFT24), purposely designed by
me, based on the SAMD21 MCU with 2.4 inch TFT touch screen with inbuilt SD card
slot, as shown in figure 5.
 |
| Figure 5 |
I have also developed software on this system
that also calculates the UTM (Universal Transverse Mercator) coordinates, shown
on the display along with other information, such as the fix quality index.
Fixed
point measurement (NTRIP) #1
The measurements saved on a SD card, have been
processed in Matlab on a PC.
Here are the outputs of my programs:
File name =
LOG00013.mat
Values averaged on 551 epochs, from
point = 1, to point = 551
Initial GPS time = 32779 and final =
33329
CEP R95 =
0.010 m
 |
| Figure 6 |
The CEP95 is a very valid index of horizontal
accuracy: it is the radius of the circle that contains 95% of the measurements.
Plotted measurements refer to a time interval
where HDOP was minimal, as seen in figure 6. However, the fix quality index was
equal to 4 (fixed ambiguity solution) for the whole recording, confirming its
good quality.
Although the reference station is 16 km away
and there is no complete visibility of the sky, the results are excellent.
Fixed
point measurement (NTRIP) #2
This measurement was made on top of a mountain,
therefore in a site without obstacles, unlike the other measurements which were
always made in mountain locations, but with some obstacles. Also here I was
closer to the reference station GENU (about 6 km).
File name = 01092109.mat
Values averaged on 280 epochs, from
point = 174, to point = 453
Initial GPS time = 32973 and final =
33252
average latitude = 44.458543193°
average longitude = 9.067446390°
Elevation = 755.25 m
CEP R95 = 0.006 m
 |
| Figure 7 |
I have included this test to show how important
it is to have coordinates with many significant digits. In this case my system
saved the coordinates with 8 decimal digits which brought a resolution to 0.8
mm on the West-East axis and from 3.3 to 4.4 mm on the South-North axis. Later
I modified the program to save the coordinates with 9 decimal places and things
have improved a lot.
Despite its relative low resolution, the
results were good, with a CEP95 measuring just 6mm.
Rectilinear
motion at constant speed
I also wanted to make a dynamic measurement: to
have a precise spatial reference, I made the rover antenna move along a
straight rail with constant speed.
To do this test I made a special device. An
aluminum profile creates a rail on which a wooden shoe slides pulled by a rope
and a pulley moved by an electric gear-motor. The figure 8 shows the gear-motor
and the tow pulley on which I made a double turn of the cable.
 |
| Figure 8 |
Here are
the outputs of my Matlab program:
File name = 30082107.mat
Values averaged on 29 epochs, from point
= 309, to point = 337
Initial GPS time = 26030 and final = 26058
Path traveled =
1.678 m
Mean speed = 0.0599 m/s
 |
| Figure 9 |
The red line, in figure 9, was drawn between
the average of the start and end points measurements.
Fixed
point measurement (direct link)
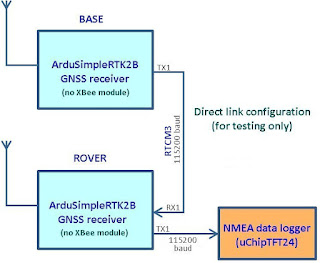
This test of the receivers excludes the
transmission system of the correction data transmitted by the base, replacing
it with a simple wire, as shown in the figure 10.
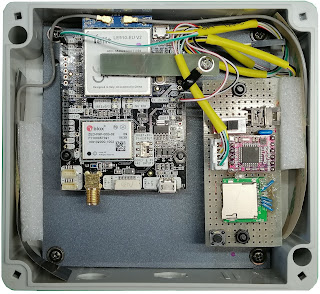
I mounted the two boards and the serial data
logger in a single case, as shown in fig. 11.
I configured the two units with the base and
rover configuration files.
 |
| Figure 10 |
Of course this is the system that should give
the maximum accuracy precisely because the two antennas are a few meters apart
and there are no radio link disturbances.
The Rover must be configured for NMEA output at
115200 baud.
 |
| Figure 11 |
The
following table shows the configuration of the switches on the two boards.
|
switch configuration |
ArduSimple V3 Base |
ArduSimple V3 Rover |
|
Swirch#1 |
XbeeTo
GPS UART1 |
XbeeTo
GPS UART1 |
|
Swirch#2 |
IOREF&
5V ARE INPUTS |
IOREF=3V3,
5V = OUTPUT |
ArduSimple
Base-Rover wiring
|
Base |
Rover |
|
Tx1 |
Rx1 |
|
Rx1
not connected |
Tx1
to logger |
|
5V
(input) |
5V
(out) |
|
Gnd |
Gnd |
|
IOREF
(input) |
IOREF
(3V3 out) |
|
USB
not connected |
USB
connected |
Arduino rails are used for wirings.
USB is connected to Rover for powering and PC
monitoring of the system.
Here are
the outputs of my Matlab program:
GNSS measurements
File name = LOG00014.mat
Values averaged on 578 epochs, from
point = 1, to point = 578
Initial GPS time = 42023 and final =
42600
CEP R95 =
0.007 m
 |
| Figure 12 |
References
1.
“ZED-F9P u-blox F9 high
precision GNSS module data sheet”, UBX-17051259- R08, www.u-blox.com, 04-Jun-2020.
2.
“ZED-F9P u-blox F9 high
precision GNSS module Integration manual”, UBX-18010802 - R08, www.u-blox.com, 02-Jun-2020.
3.
https://www.kickstarter.com/projects/simplertk2b/simplertk2b-the-first-multiband-rtk-shield-based-o
4.
https://www.ardusimple.com/simplertk2b-v3-hookup-guide/
5. https://www.ardusimple.com/product/simplertk2b-f9p-v3/
6.
https://www.ardusimple.com/4g-ntrip-client-hookup-guide/
7. https://www.ardusimple.com/configuration-files/
8.
“Logger GPS con UCHIP”, Giovanni Carrera,
‘Elettronica In’ magazine, n. 257, september 2021
No comments:
Post a Comment